Umbau eines 10A DC-Motor Speed Controller Modul für den Arduino
Die Umbauanleitung verwendet ein sehr preiswertes(ca. 6.-€) 10A PWM Modul für einen DC Motor (12V bis ca. 40V). Das Modul kann nach dem Umbau an einen Arduino PWM -Ausgang angeschlossen werden.
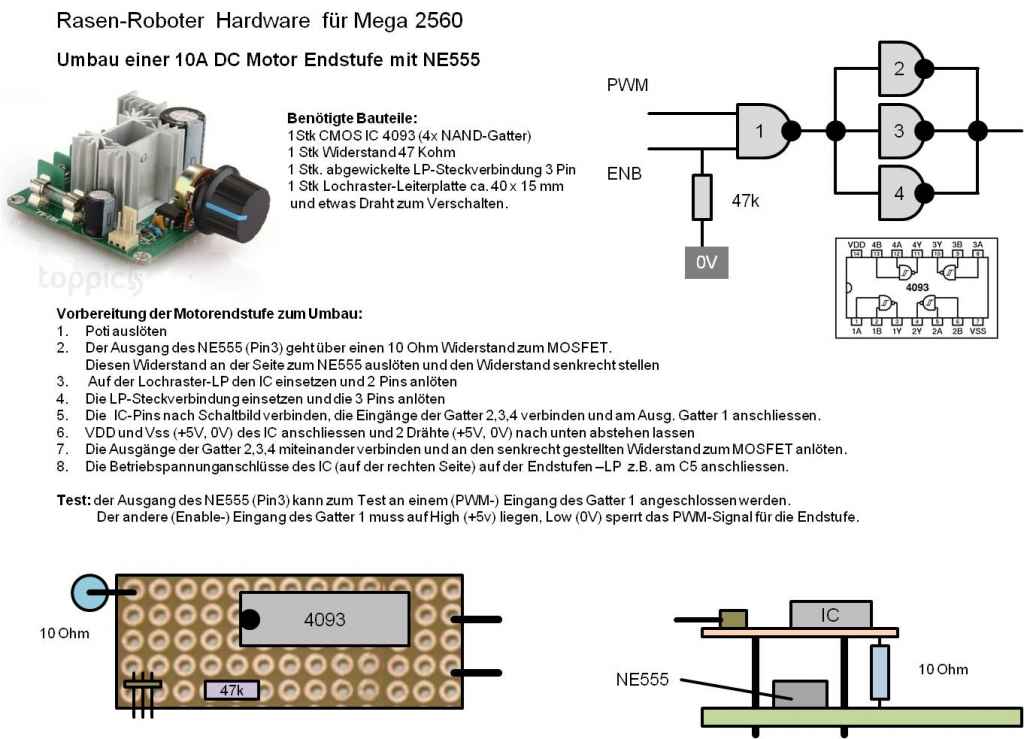
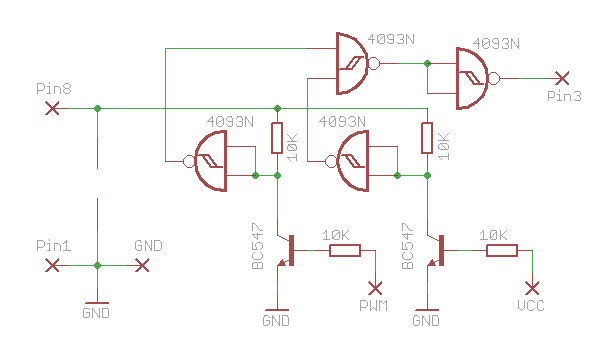
Diese Module haben i.d.R. einen internen PWM Generator mit einem NE555 und ein Poti für die PWM-Einstellung. Der Umbau verzichtet auf diese interne PWM. Es muss jedoch eine kleine Schaltung aufgebaut werden um einen Arduino PWM-Ausgang anschliessen zu können. Zusätzlich kann die Endstufe über einen Enable-Eingang ausgeschaltet werden.
Hier die Umbauanleitung:
Fragen hierzu beantworte ich gerne. Weitere Infos unter Rainer-Rebhan.de
Die Umbauanleitung verwendet ein sehr preiswertes(ca. 6.-€) 10A PWM Modul für einen DC Motor (12V bis ca. 40V). Das Modul kann nach dem Umbau an einen Arduino PWM -Ausgang angeschlossen werden.
Diese Module haben i.d.R. einen internen PWM Generator mit einem NE555 und ein Poti für die PWM-Einstellung. Der Umbau verzichtet auf diese interne PWM. Es muss jedoch eine kleine Schaltung aufgebaut werden um einen Arduino PWM-Ausgang anschliessen zu können. Zusätzlich kann die Endstufe über einen Enable-Eingang ausgeschaltet werden.
Hier die Umbauanleitung:
Fragen hierzu beantworte ich gerne. Weitere Infos unter Rainer-Rebhan.de
")
{kind=link}
{kind=link}