Hallo,
Diese Seite sieht nach einer guten Einführung in das Thema Kalman-Filter aus. Zum Verständnis empfiehlt es sich, das ganze in einer Meßwert-Simulation (z.B. mit Hilfe von SciLab ) zu erproben. Im Anhang ist das auf der Beispiel gezeigte 1D-Kalman-Filter Beispiel für SciLab.
Ich habe das Kalman-Beispiel von der genannten Seite etwas ausgebaut (SciLab-Code im Anhang, SciLab ist übrings kostenlos) - nun kann man recht gut sehen wie er funktioniert.
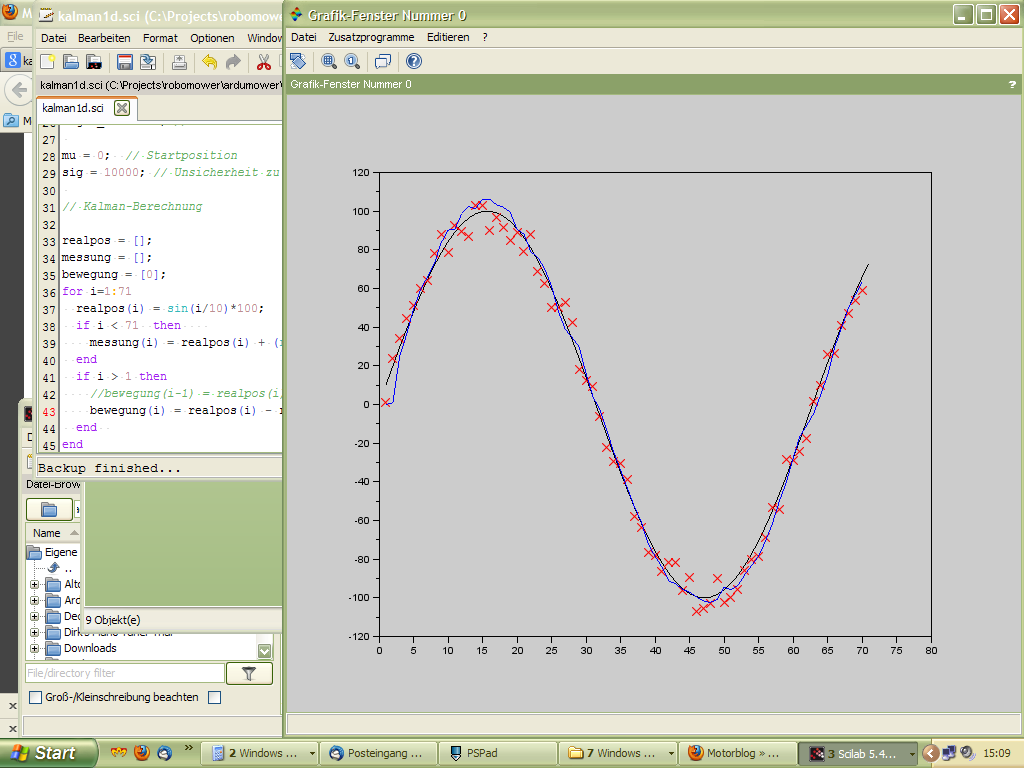
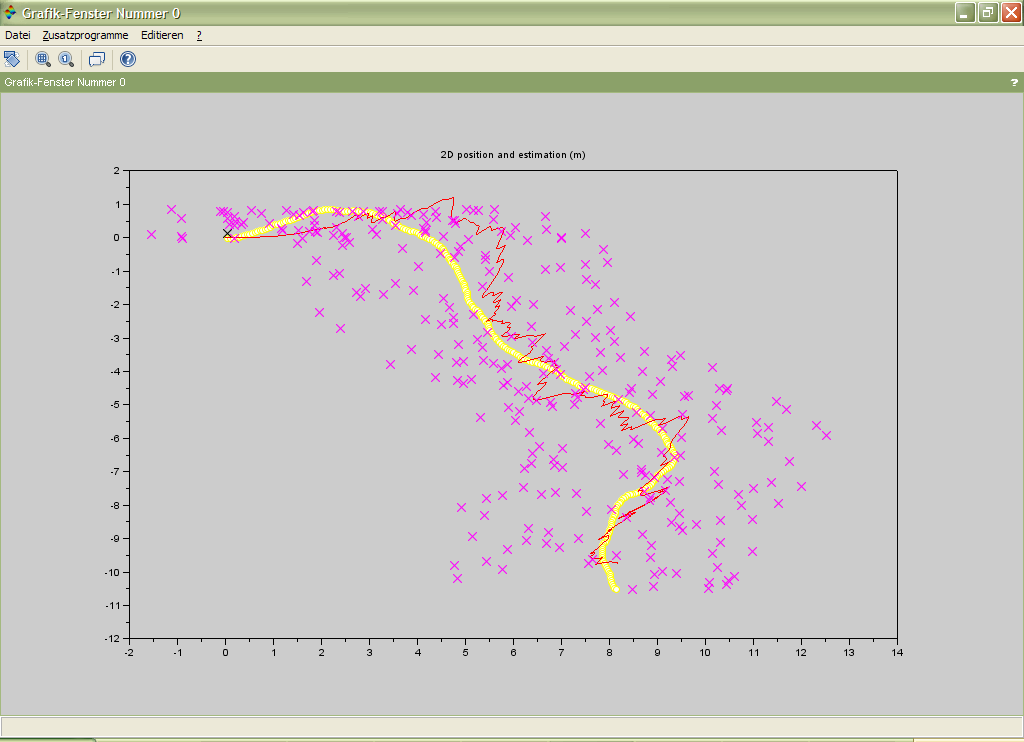
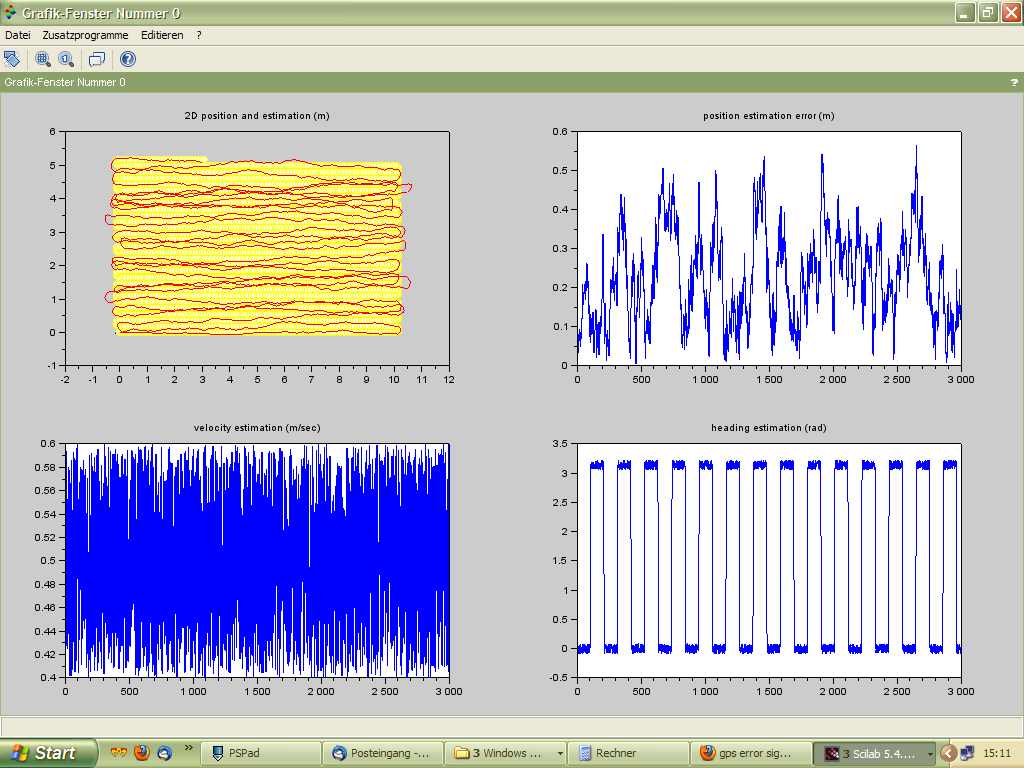
Schwarze Kurve: die realen Werte (z.B. Kompaß-Kurs in Grad)
Rote Punkte: die Meßwerte
Blaue Kurve: die vom Kalman-Filter vorhergesagten Werte!
Eingabe für den Kalman-Filter:
1. die absoluten Positionen (z.B. Meßwerte vom Kompaß)
2. die Änderungen der Meßwerte (z.B. Meßwerte vom Kompaß oder vom Gyro)
Wie man sieht funktioniert die Vorhersage gar nicht schlecht. Es ist auch keine Zeitverögerung in der Schätzung (wie man es bei einer einfachen Mittelwertbildung erwarten würden).
Gruss,
Alexander
Diese Seite sieht nach einer guten Einführung in das Thema Kalman-Filter aus. Zum Verständnis empfiehlt es sich, das ganze in einer Meßwert-Simulation (z.B. mit Hilfe von SciLab ) zu erproben. Im Anhang ist das auf der Beispiel gezeigte 1D-Kalman-Filter Beispiel für SciLab.
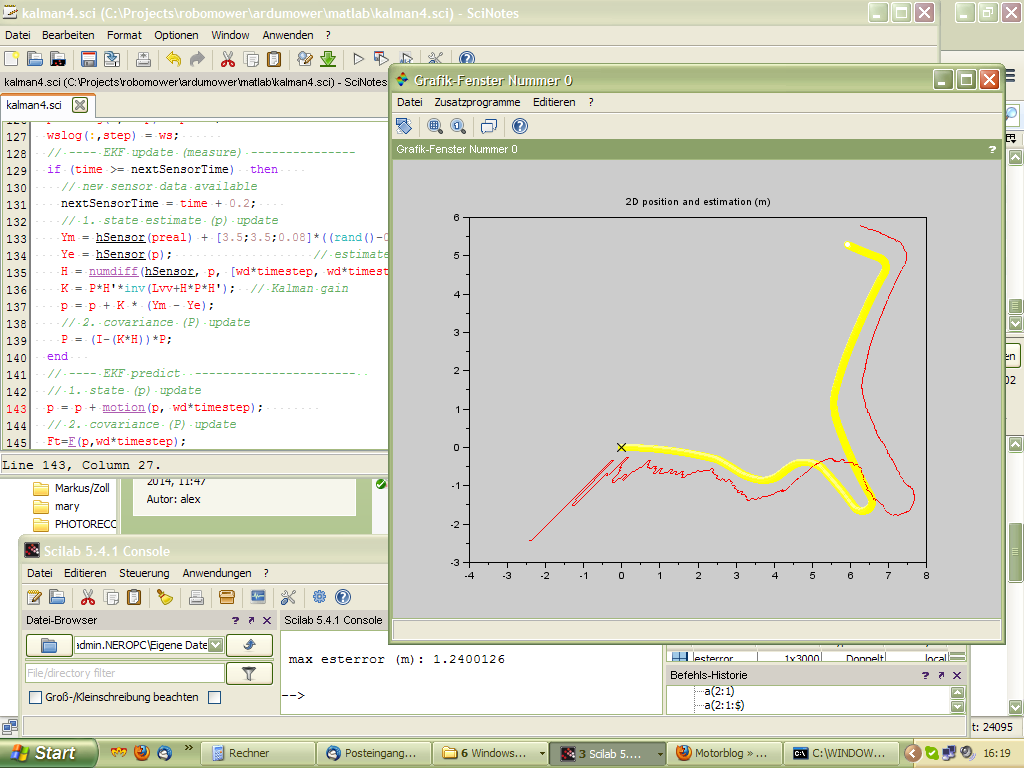
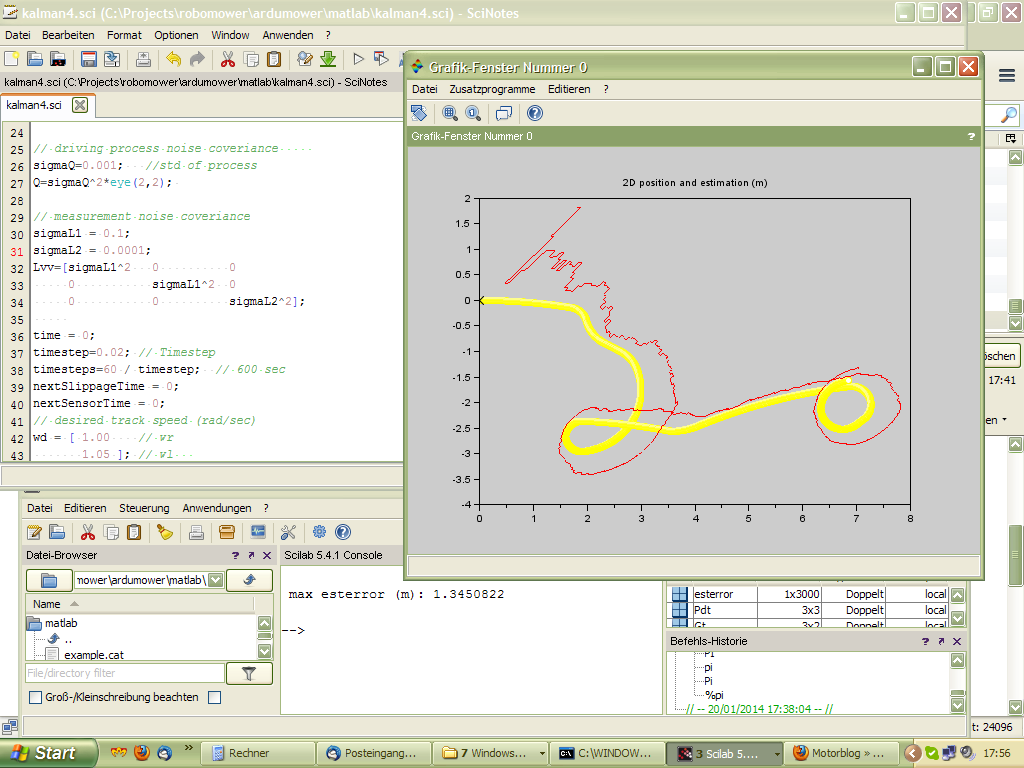
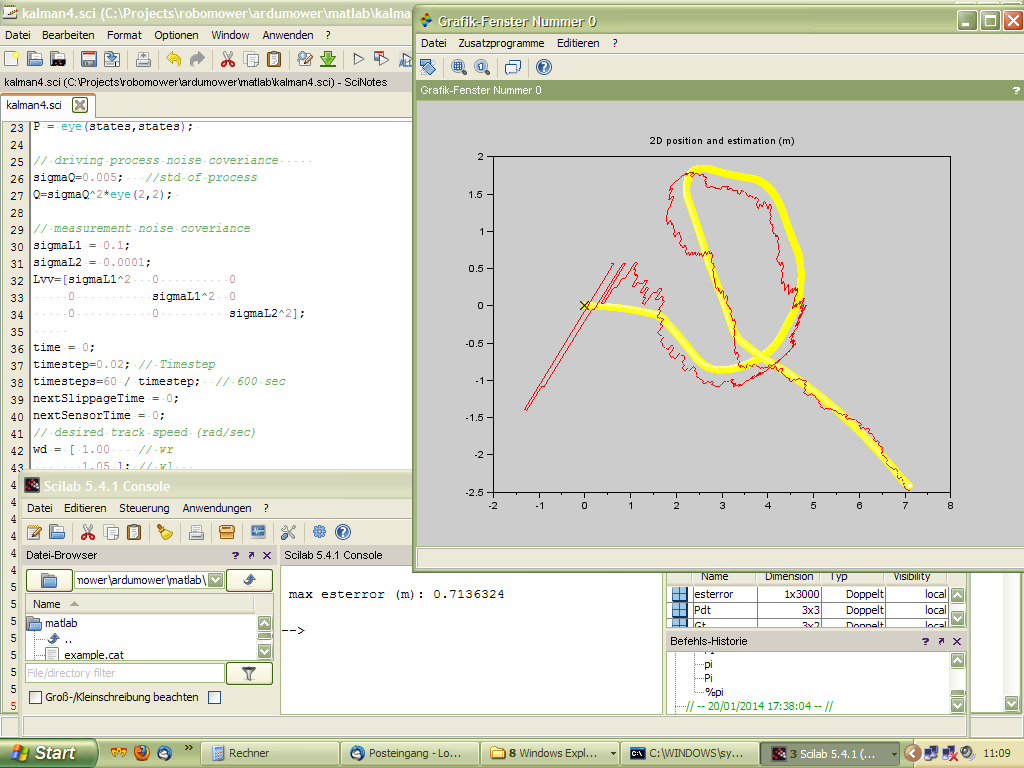
Ich habe das Kalman-Beispiel von der genannten Seite etwas ausgebaut (SciLab-Code im Anhang, SciLab ist übrings kostenlos) - nun kann man recht gut sehen wie er funktioniert.
Schwarze Kurve: die realen Werte (z.B. Kompaß-Kurs in Grad)
Rote Punkte: die Meßwerte
Blaue Kurve: die vom Kalman-Filter vorhergesagten Werte!
Eingabe für den Kalman-Filter:
1. die absoluten Positionen (z.B. Meßwerte vom Kompaß)
2. die Änderungen der Meßwerte (z.B. Meßwerte vom Kompaß oder vom Gyro)
Wie man sieht funktioniert die Vorhersage gar nicht schlecht. Es ist auch keine Zeitverögerung in der Schätzung (wie man es bei einer einfachen Mittelwertbildung erwarten würden).
Gruss,
Alexander
")




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}